TF Mini Plus Unix Agent for the Raspberry Pi
In this post we will create a Unix agent for the TF Mini+ LiDAR Range Finder. We’ll run the agent on a Raspberry Pi B+ as a daemon. This agent will send out UDP datagrams with each LiDAR Reading. Also, we can use the tfmini program as a command line tool to read from the LiDAR and change the configuration. Overall, I’ve noticed the TF Mini+ is quite accurate and snappy.
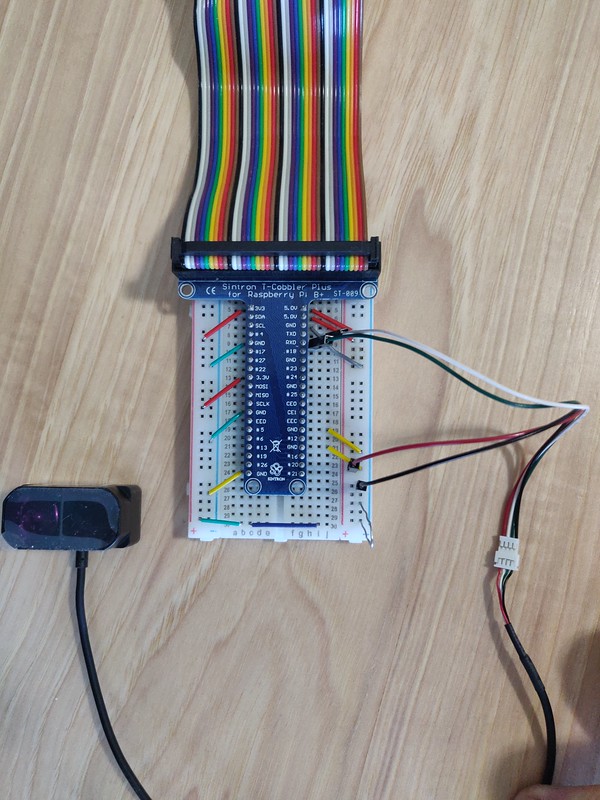
Wiring
Wiring the TF Mini to the Raspberry Pi is simple. It’s only 4 wires and we’ll wire it to the UART. LiDAR frames from the TF Mini+ are sent to the Raspberry Pi at the default 115,200 Baud rate. Each frame will come at a rate of 100Hz by default.
| RPI Pin | RPI Desc | TF Mini+ Pin | TF Mini Desc |
|---|---|---|---|
| +5V | +5V Power Supply | 1 Red | +5V Supply |
| 8 | GPIO 14 UART TXD | 2 White | RXD UART |
| 10 | GPIO 15 UART RXD | 3 Blue | TXD UART |
| GND | Ground | 4 Black | Ground |
Raspberry Pi Setup
The Raspberry Pi involves enabling the UART and giving proper permissions to the pi user. Use the raspi-config command to enable the UART. This code will use the UART mapped /dev/ttyAMA0 on the filesystem.
This is how my user is configured:
$ whoami
pi
$ groups
pi adm tty dialout cdrom sudo audio video plugdev games users input netdev gpio i2c spi
$ ls -l /dev/ttyAMA0
crw-rw---- 1 root dialout 204, 64 Oct 7 17:31 /dev/ttyAMA0Note, the Unix user running the program will need to be in the dialout and tty groups. Being added to these groups won’t take effect until you log back out and into the session again.
$ sudo usermod -a -G dialout pi
$ sudo usermod -a -G tty pi
$ exit # logout for groups to take effectInstalling the Agent
Here are the steps to install the agent. The software comes packaged as an autotools project. Enter this on a terminal on the Raspberry Pi as the pi user.
$ wget http://lloydrochester.com/code/tf_mini_plus_rpi-1.1.tar.gz
$ tar zxf tf_mini_plus_rpi-1.1.tar.gz
$ cd tf_mini_plus_rpi-1.1
$ ./configure
$ makeOnce built we can install it on the system.
$ sudo make install # sudo make uninstall will remove itNow run the tfmini program.
$ tfmini --help
Usage: ./tfmini [OPTIONS]
A command line tool to interact with the TF Mini+.
OPTIONS:
-h, --help Print help
-r, --reset SW Reset
--firmware-version Read firmware version
--measure-mm Set measurment units to mm
--measure-cm Set measurment units to cm
--disable-lidar-output Disable output of the LiDAR
--enable-lidar-output Enable output of the LiDAR
--disable-lidar-output Disable output of the LiDAR
--set-update-rate RATE Set Lidar Frame Rate [1-1000]Hz
-x, --discard-bad-checksum Discard LiDAR frames with bad checksums
-v, --verbose Verbose Output
-u, --socket-udp HOST:PORT Output data to a UDP Socket
-p, --poll Poll the LiDAR and print to STDOUT
-d, --daemon Run as a Daemon
Version: 1.1If you choose to not install the tfmini program system wide just run the binary from the src folder like so:
$ ./src/tfmini -hYou could then add the binary to your path:
export PATH=$PATH:$HOME/tf_mini_plus_rpi/srcSource Code in Github
See the source code in Github tfmini_agent.
Verifying the Installation
We can read and write settings to the TF Mini+, but need to disable the LiDAR output to do so. From there we can read the firmware version. Lastly, we’ll enable the LiDAR output again.
To ensure the wiring is correct and you can read from the UART try this:
$ tfmini --disable-lidar-output
LiDAR output disabled
$ tfmini --firmware-version
V3.9.1
$ tfmini --measure-cm
Measurement unit set to centimeters
$ tfmini --poll
LiDAR output enabled
Distance: 04 Strength: 1736 Good Frames: 00000286 Bad Frames: 00000000
^CWhen we run tfmini --poll it will poll the LiDAR and output distance and strength to the command line. It looks like this:
Running the Agent as a Unix Daemon
The tfmini program is meant to run as a Unix daemon where it sends out UDP datagrams. Another client program would be written listen on the port the agent is sending UDP datagrams to, decode them and do something useful with them. Let’s run tfmini as a daemon and then see how we can inspect the UDP datagrams.
By doing a sudo make install a systemd service unit will be installed.
|
|
From there we need to reload the systemd manager configuration and start the service.
$ sudo systemctl daemon-reload
$ sudo systemctl start tfmini
$ sudo systemctl status tfmini
sudo systemctl status tfmini
● tfmini.service - TF Mini Service sending LiDAR Frames over UDP
Loaded: loaded (/lib/systemd/system/tfmini.service; disabled; vendor preset: enabled)
Active: active (running) since Sun 2020-10-18 15:31:59 MDT; 5s ago
Process: 26231 ExecStart=/usr/local/bin/tfmini --measure-cm --daemon --socket-udp 127.0.0.1:2210 (code=exited, status=0/SUCCESS
Main PID: 26233 (tfmini)
Tasks: 1 (limit: 2077)
Memory: 296.0K
CGroup: /system.slice/tfmini.service
└─26233 /usr/local/bin/tfmini --measure-cm --daemon --socket-udp 127.0.0.1 2210
Oct 18 15:31:59 pi2 systemd[1]: Starting TF Mini Service sending LiDAR Frames over UDP...
Oct 18 15:31:59 pi2 tf_mini[26231]: LiDAR output disabled
Oct 18 15:31:59 pi2 tf_mini[26231]: Measurement unit set to centimeters
Oct 18 15:31:59 pi2 systemd[1]: Started TF Mini Service sending LiDAR Frames over UDP.
Oct 18 15:31:59 pi2 tf_mini[26233]: LiDAR output enabledVerifying the Agent Works using Netcat
By default the agent is sending to localhost on port 2210. We can use the nc Unix tool to see if we’re receiving UDP datagrams.
$ nc -v -l -u 127.0.0.1 2210
Listening on [localhost] (family 2, port 2210)
Connection from localhost 34970 received!
YY{P �YYsP �YYqP �YYtP �YYuP �YYrP �YYsP �YYqP �YYwP �YYuP �YYyP �YYxP �YYyP �YYtP �YYtP �YYvP �YYwP �YYvP �YYyP �YYxP �YYpP �YYuP �YYwP �YYxP �YYuP �YYvP �YYpP �YYzP �YYyP �YYuP �YYwP �YYwP �YYrP �YYtP �YYpP �YYtP �YYqP �YYvP �YYsP �YYxP �YYuP �YYqP �YYpP �YYuP �YYxP �YYsP �YYwP �YYuP �YYpP �YYpP �YYxP �YYuP �YYsP �YYqP �YYxP �YYwP �YYsP �YYtP �YYoP �YYyP �YYtP �YYrP �YYsP �YYuP �YYvP �YYqP �YYuP �YYsP �YYyP �YYrP �YYwP �YYrP �YYvP �YYwP �YYoP �YYrP �YYtP �YYrP �YYqP �YYvP �YYpP �YYuP �YYsP �YYxP �YYzP �YYwP �YYrP �YYuP �YYvP �YYwP �YYvP �YYwP �YYrP �YYuP �YYvP �YYsP �YYuP �YYqP �YY}P �YYuP �YYxP �YYwP �YYyP �YYlP �YYqP �YYqP �YYmP �YYsP �YYwP �YYuP �^CExample Reading LiDAR Frames with Python
To read LiDAR Frames from the Agent all you need to do is create a Datagram UDP socket, bind to the host and port then receive from the socket. Here is a python example.
import socket
import sys
HOST = 'localhost'
PORT = 2210
# Create a Datagram (UDP) socket
try :
s = socket.socket(socket.AF_INET, socket.SOCK_DGRAM)
print 'Socket created'
except socket.error, msg :
print 'Failed to create socket. Error Code : ' + str(msg[0]) + ' Message ' + msg[1]
sys.exit()
# Bind socket to HOST and PORT
try:
s.bind((HOST, PORT))
except socket.error , msg:
print 'Bind failed. Error Code : ' + str(msg[0]) + ' Message ' + msg[1]
sys.exit()
while 1:
(string, address) = s.recvfrom(9)
frame = bytes(string)
header1 = ord(frame[0])
header2 = ord(frame[1])
distance_low = ord(frame[2])
distance_high = ord(frame[3])
distance_high <<= 8
distance = distance_low + distance_high
strength_low = ord(frame[4])
strength_high = ord(frame[5])
strength_high <<= 8
strength = strength_low + strength_high
checksum = ord(frame[8])
if header1 + header2 != (0x59 + 0x59):
print("error in headers")
print str(distance) + ' ' + str(strength)
t.close()When we run this example we’ll see the distance and strength printed to standard output.
$ python exsock.py
Socket created
4 1616
4 1620
4 1621
4 1623
4 1618
3 1627CPU Usage
The CPU usage is quite low. The top command is shows about 1.3-1.7% CPU.
top - 15:45:53 up 7 days, 24 min, 2 users, load average: 0.70, 0.32, 0.11
Tasks: 109 total, 1 running, 108 sleeping, 0 stopped, 0 zombie
%Cpu(s): 0.2 us, 0.6 sy, 0.0 ni, 99.2 id, 0.0 wa, 0.0 hi, 0.0 si, 0.0 st
MiB Mem : 874.5 total, 591.5 free, 66.7 used, 216.3 buff/cache
MiB Swap: 100.0 total, 97.0 free, 3.0 used. 735.8 avail Mem
PID USER PR NI VIRT RES SHR S %CPU %MEM TIME+ COMMAND
27826 root 20 0 1868 84 0 S 1.3 0.0 0:00.49 tfmini
27863 pi 20 0 10296 2984 2476 R 1.0 0.3 0:00.23 topChanging the UDP Port and other settings
It’s very likely that the loopback address 127.0.0.1 and port 2210 isn’t what you desire. To change this simple edit the systemd/tfmini.service file. The file looks something like this.
|
|
Known Issues
The TF Mini+ sends out LiDAR frames on it’s TXD Pin asynchronously to what it receives on it’s RXD pin. If you send it a command by the time it receives it and send the response it may send out some more LiDAR frames. Currently, the software won’t discard these frames and receive the respose to the command. For example if you disable LiDAR output it might send a couple frames by the time the TF Mini+ sends back the LiDAR output is disabled. Typically this is fine but it may manifest it self a couple of failed checksums. I’ve also noticed this when the --reset flag is used.
I typically will run:
$ tfmini --disable-lidar-outputThis will allow for sending some commands until the --poll or --socket-udp options are used. If there ends up being a lot of usage of this I’ll go ahead and make sure this cannot happen.